Przetłumaczył: Piotr Maciejewski
22 Odbiorniki na podczerwień i na radio UR90 i UR91.
Aby używać DT400 jako manipulator na podczerwień, musisz zainstalować jeden lub więcej odbiorników podczerwieni podłączonych do Loconet. Aby używać DT400 jako manipulatora na radio musisz zainstalować przynajmniej jeden nadajnik radiowy podłączony do Loconet. Dobrą praktyką jest zainstalować także kilka normalnych kontaktów z LocoNet na około makiety, aby normalnie chodzić z manipulatorem przewodowym. Takie manipulatory podłączone kablem do LocoNet są także używane do wybierania lokomotywy, ustawianiem i zarządzaniem jazdy wielokrotnej, programowaniem dekoderów. Także, gdy bezprzewodowe manipulatory tracą kontrolę nad lokomotywą lub bateria w manipulatorze skończy się, operator może podłączyć manipulator kablem do kontaktu aby ponownie móc sterować makietą.
22.1 Zasilanie odbiorników UR90 i UR91
Dla zapewnienia najlepszej pracy panele UR90, UR91 i UP powinny być zasilane z oddzielnego zasilacza 12V DC takiego jak np: Digitrax PS12. Możesz zasilić do 5 paneli UP i UR za pomocą jednego zasilacza 12-15V DC. Panel UR91 absolutnie musi być zasilany poprzez zasilacz 12V DC. Panele UR91 i UP mogą być zasilane z torów. Jeżeli zasilasz panel z torów, to pamiętaj, że może to mieć wpływ na ilość uruchomionych jednocześnie lokomotyw, ponieważ część energii będzie zużyta na zasilanie paneli. Rekomendujemy podłączenie paneli UP i UR jak na poniższym rysunku.
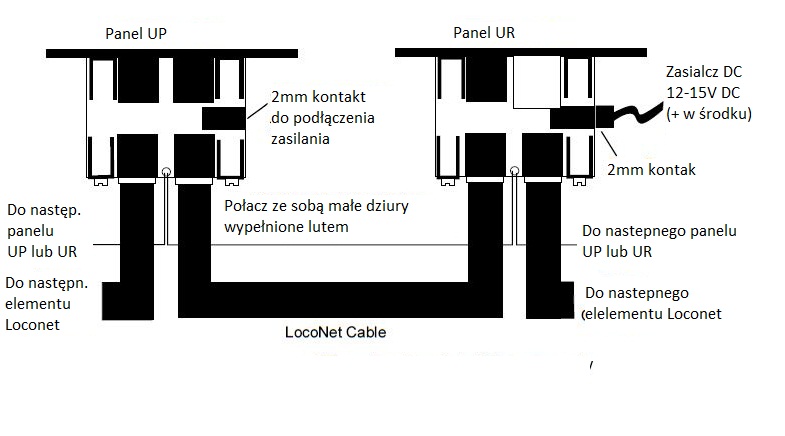
22.1.2 UR90/UR91 podłączenie sygnalizacji zasilania torów
Uwaga: Podłączenie sygnalizacji zasilania torów jest opcjonalne.
Sygnalizacja zasilania torów jest realizowana poprzez dwukolorową diodę LED, która pokazuje stan zasilania torów, do których panel jest podłączony.
1. Połącz za pomocą przewodu 18-26AWG wyjście z tyłu panelu z jedną z szyn toru.
2. Połącz za pomocą przewodu 18-26AWG drugie wyjście z tyłu panelu z druga z szyn toru.
3. Jeżeli podłącza więcej niż jeden panel UR lub UP, pamiętaj o podłączeniu tych samych wyjść z tymi samymi torami szyn. To jest rekomendowane, ale nie jest wymagane.
Podczas pracy makiety, sygnalizacja zasilania torów będzie się świeciła, kiedy tory są pod napięciem. Dioda będzie się świeciła na czerwono lub zielono jeżeli sterujesz analogowymi lokomotywami. Jeżeli sterujesz cyfrowe lokomotywy dioda będzie świeciła się na pomarańczowo. Zmiany barwy diody są bardzo dobrym narzędziem diagnostycznym.
22.2 Podstawowa instalacja UR90 i UR91
Podczas instalacji odbiorników na podczerwień lub radiowych powinieneś móc widzieć lub/i słyszeć swoją centralkę, aby się upewniać, że otrzymuje ona rozkazy poprzez panele UR. Poniższa instalacja pozwoli ci znaleźć najlepsze miejsce do instalacji paneli UR90 i UR91 na makiecie, aby otrzymywały one w optymalny sposób sygnał podczerwony lub radiowy. Musisz mieć możliwość odczytania, czy system otrzymuje sygnał czy nie. System Digitrax daje kilka możliwości odczytania takiej informacji. Powinieneś wybrać najwłaściwszy sposób w zależności od posiadanej makiety. Na przykład: dla małych makiet najwygodniej może być bezpośrednia obserwacja centralki. Ale przy dużych makietach lepiej będzie ustawić centralkę tak, aby wydawała dźwięki kiedy otrzymuje rozkazd (punkt 4 poniżej).
1. Na centralce DCS100 czerwona dioda NET miga, gdy centralka otrzymuje poprawny rozkaz LocoNet.
2. Przy ustawionym adresie 00 na manipularze i prędkości 99%, na centralce DCS100 lu DB15 dioda TRACK STATUS zmienia kolor z czerwonej na zieloną (lub odwrotnie) w momencie zmiany kierunku jazdy. Możesz wykonywać ten test bez posiadania lokomotywy analogowej. Jeżeli posiadasz taką lokomotywę, to powinieneś ją usunąć z makiety, aby wyeliminować kolejne miejsce, które może powodować problemy. Jeżeli nie widzisz swojej centralki z każdego miejsca zobacz kolejny punkt, aby dowiedzieć się jak obserwować powyższy efekt także z takich miejsc.
3. Użycie LT1 jako lokalnego wskaźnika torowego. Patrz zdjęcie poniżej.
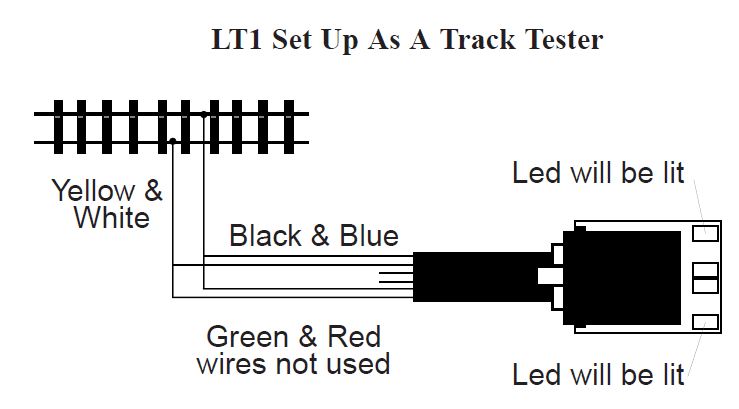
a. Połącz czarny i niebieski przewód.
b. Połącz zółty i biały przewód.
c. Połącz przewód czary/niebieski do jednej szyny, a żółto/biały do drugiej.
d. Dwie zewnętrzne diody LT1 będą się świecić
e. Przy użyciu manipulatora zmień kierunek lokomotywy na adresie 00 przy 99% prędkości. Jedna z dwóch diod na LT1 będzie jaśniejsza.
f. Zmień kierunek ponownie, druga dioda będzie jaśniejsza.
W ten sposób będziesz mógł obserwować, czy centralka otrzymuje komendy z bezprzewodowego manipulatora.
To narzędzie możesz wziąść ze sobą i umożliwi ci poruszanie się na około makiety. Za pomocą niego będziesz mógł w każdym miejscu sprawdzić, czy centralka otrzymuje informacje z twojego bezprzewodowego manipulatora bez konieczności patrzenia na centralkę.
Możesz także w ten samo sposób użyć dwukolorowych diod z opornikiem 500 lub 1k ohm połączonym szeregowo, podłączonymi do dwóch szyn toru.
4. Możesz także przełączyć przełącznik OpSw #41 w centralce, aby generowała krótkie diagnostyczne dźwięki za każdym razem, jak otrzyma poprawny rozkaz poprzez sieć LocoNet. Zobacz w instrukcji do DB150 lub DCS100 jak zmienić ten przełącznik. Nie ma to żadnego skutku ubocznego oprócz dawania diagnostycznego krótkiego dźwięku. Po zakończeniu instalowania paneli UR90 lub UR91 należy przełącznik OpSw #41 przełączyć z powrotem, aby wyłączyć dźwięk.
22.3 Instalacja odbiornika na podczerwień UR90
Wielu modelarzy po prostu podłącza jeden lub więcej paneli UR90 na około makiety a potem zaczyna eksperymentowanie, gdzie doinstalować dodatkowe panele, aby odbiór sygnału podczerwonego był lepszy. Poniższa instrukcja jest bardzie zorganizowana i pomoże zainstalować ci mniej paneli UR90, aby uzyskać odpowiednie pokrycie i zaoszczędzić trochę pieniędzy.
Ponieważ łączność na podczerwień jest oparta na liniach świetlnych panele UR90 muszą być umieszczone w ten sposób, aby sygnał podczerwony wysyłany z manipulatora był "widziany" przez UR90. Odbicia od ścian i sufitu pomoże w odbiorze sygnału podczerwonego, ale umieszczenie więcej niż jednego odbiornika może być wymagane, aby pokryć całą twoją makietę.
1. Zdecyduj, jak będziesz obserwował, czy centralka otrzymuje komendy z manipulatora bezprzewodowego. Patrz rozdział 22.2 powyżej.
2. Usuń wszystkie lokomotywy z makiety i odłącz zasilanie od systemu.
3. Podłącz panel UR90 do sieci Loconet najbliżej miejsca, gdzie myślisz, że instalacja będzie najlepsza. Pamiętaj, że światło podczerwone rozchodzi się po liniach prostych.
4. Podłącz zasilanie do panela UR90 zgodnie z rozdziałem 22.1 powyżej.
5. Podłącz zasilanie do makiety i torów.
6. Włóż 9V baterię do twojego manipulatora DT400 i podłącz go do Loconet. DT400 automatycznie wykryje obecność UR90 i pozwoli na połączenie podczerwone w momencie odłączenia od sieci Loconet.
7. Będąc podłączonym do sieci Loconet ustaw adres 00 i prędkość 99% na manipulatorze. (Ponieważ nie ma żadnych lokomotyw na makiecie, nic nie powinno jeździć. Będziemy używać tej metody do wykrycia najlepszego miejsca dla panela UR90.)
8. Zmień kierunek jazdy dla adresu 00 poprzez naciśnięcie przycisku Reverse lub podwójnego naciśnięcia pokrętła związanego z tym adresem. Zaobserwuj, czy rozkaz został odebrany przez centralkę obserwując kolor diody TRACK STATUS na centralce lub za pomocą innej metody wybranej w rozdziale 22.2.
9. Odłącz DT400 od Loconet. Poruszaj się naokoło makiety zatrzymując się w kilku miejscach i testując system. W każdym miejscu zmień kierunek jazdy dla adresu 00 i obserwuj, czy centralka otrzymała rozkaz. Powoli obracaj się w każdym miejscu, aby przetestować połączenie z różnych kierunków. Poruszając się naokoło makiety znajdź miejsca, gdzie występują dziury w łączności z centralką.
10. Po zlokalizowaniu dziur w łączności zmień miejsca panela UR90 dopóki nie uzyskasz dobrej łączności z centralką w każdym miejscu na około makiety.
11. Po znalezieniu najlepszego miejsca na panel UR90 możesz przymocować go na stałe.
22.4 Instalacja odbiornika radiowego UR91
Poniższa instrukcja umożliwi ci znalezienie najlepszego miejsca na instalacje panelu UR91.
1. Zdecyduj, jak będziesz obserwował, czy centralka otrzymuje komendy z manipulatora bezprzewodowego. Patrz rozdział 22.2 powyżej.
2. Usuń wszystkie lokomotywy z makiety i odłącz zasilanie od systemu.
3. Delikatnie wyprostuj dwie małe giętkie antenki wystające z UR91, aby były skierowane do góry. Następnie odchyl o jakieś 20 stopnie od siebie. Postaraj się nie zginać zielonych anten zbyt często, ponieważ może to spowodować ich zniszczenie. Nie pozwól aby anteny UR91 dotykały gołych elementów ani okablowania makiety. Najlepiej trzymać inne przewody w odległości co najmniej 1-2 stóp (3-5 cm) od anten.
4. Podłącz zasilacz PS12 12V DC do gniazdka z tyłu panela UR91. Zobacz rozdział 22.1 powyżej aby znaleźć więcej informacji.
5. Podłącz UR91 do LocoNet niedaleko miejsca gdzie planujesz zainstalować panel. Sugerujemy aby zacząć od centralnego miejsce, które prawdopodobnie dostarczy najlepszego pokrycia sygnałem obszaru.
6. Podłącz makietę do zasilania i tory.
7. Zielona dioda na panelu UR91 zaświeci się, kiedy UR91 przeprowadzi wewnętrzne testy i będzie gotowy do przyjmowania sygnału radiowego.
8. Podłącz 9V baterię do DT400R i podłącz manipulator do LocoNet.
9. Będąc podłączonym do sieci Loconet ustaw adres 00 i prędkość 99% na manipulatorze. (Ponieważ nie ma żadnych lokomotyw na makiecie, nic nie powinno jeździć. Będziemy używać tej metody do wykrycia najlepszego miejsca dla panela UR91.)
10. Zmień kierunek jazdy dla adresu 00 poprzez naciśnięcie przycisku Reverse lub podwójnego naciśnięcia pokrętła związanego z tym adresem. Zaobserwuj, czy rozkaz został odebrany przez centralkę obserwując kolor diody TRACK STATUS na centralce lub za pomocą innej metody wybranej w rozdziale 22.2.
11. Odłącz DT400R od Loconet. Poruszaj się naokoło makiety zatrzymując się w kilku miejscach i testując system. W każdym miejscu zmień kierunek jazdy dla adresu 00 i obserwuj, czy centralka otrzymała rozkaz. Powoli obracaj się w każdym miejscu, aby przetestować połączenie z różnych kierunków. Poruszając się naokoło makiety znajdź miejsca, gdzie występują dziury w łączności z centralką.
12. Po zlokalizowaniu dziur w łączności zmień miejsca panela UR90 dopóki nie uzyskasz dobrej łączności z centralką w każdym miejscu na około makiety.
13. Po znalezieniu najlepszego miejsca na panel UR91 możesz przymocować go na stałe.
Zielona dioda RADIO na panelu UR91 miga w momencie, gdy panel otrzymuje wiadomość od DT400R. Oznacza to, że połączenie radiowe działa poprawnie.
Podpowiedź: Jeżeli zielona dioda RADIO miga, a nie ma odpowiedzi z centralki lub lokomotywy prawdopodobnie zostało zamienione przewody przy zakładaniu wtyczki na kablu. Powinieneś przetestować wszystkie kable za pomocą swojego LT1 aby znaleźć problem. Aby naprawić wtyczkę najlepiej jest uciąć źle zamontowaną wtyczkę i ponownie zacisnąć nową wtyczkę na kablu poprawnie prowadząc przewody. Możesz także naprawić problem poprzez zdjęcie izolacji na kablu LocoNet i połączeniu dwóch środkowych przewodów (czerwonego i zielonego). Upewnij się, że połączone kable ciągną się przez kabel tak jak poprzednio.
22.4.1 Rozwiązywanie problemów związanych z łącznością radiową
Większość makiet nie ma problemów z łącznością radiową. Jednak jeżeli występują problemy, przedstawiamy listę sugestii, które mogą poprawić odbiór sygnału.
1. Przewody elektryczne, elementy metalowe lub inne elementy mogą spowodować pogorszenie odbioru sygnału radiowego na około makiety. Jest to najczęściej spowodowane wielokrotnymi odbiciami i tworzeniem się echa fal radiowych. Przesunięcie DT400R o 6 do 12 cali (15 do 30 cm) w dowolnym kierunku lub zmiana orientacji samego DT400R przeważnie powoduje polepszenie odbioru. Innym rozwiązaniem jest zmiana miejsca umieszczenia UR91. Czasami bardziej centralne umieszczenie UR91 jest lepsze, czasami przesunięcie UR91 w całkiem inne miejsce polepsza sytuację. Ponieważ każda makieta jest inna próbowanie rożnych miejsc przed znalezieniem właściwego jest dobrą praktyką.
2. Zmień położenia anten UR91 z rekomendowanej litery "V" do ułożenia pionowego. Takie ułożenie daje lepsze rezultaty odbioru polaryzacji pionowej w niektórych budynkach o metalowej podłodze i dachu. Wymiana anten UR91 _nie_ prowadzi do zwiększenie zasięgu!
3. Jeżeli zmiana położenia ani anten UR91 nie powoduje zniknięcia dziur w łączności ani problemów z zasięgiem, należy rozważyć dodanie drugiego panelu UR91 zainstalowanego w dużej odległości od pierwszego UR91. Gdy używasz więcej niż jednego UR91 na makiecie, będą one automatycznie współpracowały ze sobą poprzez LocoNet.
4. Zauważ, że DT400R i UR91 współdzielą częstotliwości z innymi urządzeniami radiowymi i mogą czasami występować interferencje. Jeżeli takie interferencje występują rozważ używanie DT400R podłączonej przewodem do czasu rozwiązania problemów. Możesz wyłączyć sygnał radiowy w DT400R poprzez modyfikację wartości w zmiennej Op #2. Patrz rozdział 25.2 aby dowiedzieć się więcej jak zmienić to ustawienie.
23 Bezprzewodowe używanie DT400R
Wszystkie DT400 są "gotowe do łączności na podczerwień". Oznacza to, że wszystkie DT400 są wyposażone w diodę podczerwoną, która może wysyłać sygnał na podczerwień. Aby używać łączności na podczerwień musisz tylko zainstalować jeden lub więcej odbiorników podczerwieni na makiecie.
DT400R jest wyposażone w łączność radiową. Aby używać DT400R z połączeniem radiowym musisz wyposażyć swoją makietę w odbiornik radiowy.
Aby używać DT400/R w sposób bezprzewodowy musisz podłączyć baterię 9V. Używanie DT400/R bezprzewodowo jest proste:
1. Dla używania łączności na podczerwień podłącz przynajmniej jeden odbiornik podczerwieni (UR90 lub UR91) do Loconet. Ponieważ łączność na podczerwień biegnie po liniach prostych więcej niż jeden odbiornik może być potrzebny aby manipulator poprawnie działał na twojej powierzchni.
2. Dla używania łączności radiowej podłącz przynajmniej jeden odbiornik radiowy UR91 do LocoNet. Dla większości makiet wystarczy tylko jeden odbiornik UR91.
3. Zainstaluj baterię 9V w swoim DR400/R. Zobacz w rozdziale 24 jak zainstalować baterię.
4. Podłącz manipulator DT400/R do LocoNet aby mógł zweryfikować, że przynajmniej jeden odbiornik podczerwieni lub/i radia jest podłączony do sieci. Manipulator wyświetli na wyświetlaczu lub rA lub Ir (w zależności czy znalazł odbiornik podczerwieni czy radiowy) z numerem LocoNet ID. Na poniższym przykładzie widać, że DT400/R wykrył odbiornik radiowy i aktualny numer Loconet ID wynosi 01. Ten manipulator ma przydzielone adresy lokomotyw 03 i 1280.
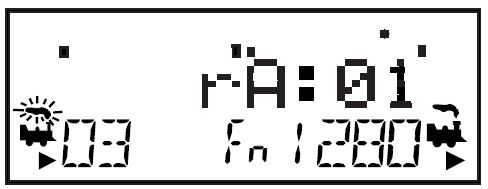
5. Manipulator DT400/R będzie używał LocoNet ID otrzymany z LocoNet podczas podłączenia, gdy zostanie odłączony od LocoNet i zacznie wykorzystywać łączność na podczerwień lub radiową. Pod odłączeniu od LocoNet zostanie włączony wskaźnik łączności bezprzewodowej na wyświetlaczu i na kilka sekund pojawi się informacja o rodzaju łączności i LocoNet ID.
6. Po naciśnięciu pokręteł lub pokręceniu nimi DT400 wyświetli na wyświetlaczu standardowy ekran wskazujący pracę w trybie funkcji Fn.
Jeżeli bezprzewodowy manipulator DT400/R wykryje brak aktywności użytkownika przez 3 minuty, przejdzie w tryb oszczędzania energii i na wyświetlaczu pojawi się 'r-PS':

Na wyświetlaczu może się co 60 sekund pojawiać na chwilę normalny ekran trybu funkcji Fn. Pojawia się on w momencie, gdy manipulator testuje, czy ciągle jest podłączony do centralki. To zapobiega automatycznemu zwalnianiu lokomotyw z powrotem do systemu, co mogłoby pozwolić innym użytkownikom przejęcie ich do swoich manipulatorów.
Naciśnij i przytrzymaj przycisk PWR aby wybudzić manipulator z trybu oszczędzania energii. Naciśniecie dowolnego przycisku lub poruszenie pokrętłami także spowoduje wyjście z trybu oszczędzania energii i powrót do normalnej pracy w trybie Fn.
Uwaga związana z Szybkim Zegarem: Podczas przechodzenie w tryb oszczędzania energii Szybki Zegar w manipulatorze będzie się rozsynchronizował z zegarem w centralce. Po ponownym podłączeniu do sieci Loconet Szybki Zegar zostanie ponownie zsynchronizowany z zegarem w centralce.
23.1 Zmiana LocoNet ID
W momencie podłączenia do sieci LocoNet, DT400/R loguje się do odbiorników na podczerwień i radiowych wykorzystując LocoNet ID. Domyślnie LocoNet ID wynosi 0. Może występować potrzeba zmiany LocoNet ID w sytuacji, gdy kilka klubów operuje w niedużej odległości koło siebie (np: na pokazach), aby komendy wysyłane przez jeden klub nie kolidowały z komendami wysyłanymi przez drugi klub.
Aby zmienić LocoNet ID należy:
1. Odłączyć DT400/R od sieci LocoNet dla którego chcesz zmienić LocoNet ID.
2. Nacisnąć i trzymać przycisk EDIT  na DT400/R i jednocześnie podłączyć manipulator z powrotem do LocoNet. Po czym można puścić przycisk EDIT.
na DT400/R i jednocześnie podłączyć manipulator z powrotem do LocoNet. Po czym można puścić przycisk EDIT.
3. Na wyświetlaczu DT400/R zostanie wyświetlone E1 w polu trybu manipulatora oraz aktualny numer LocoNet ID: "Ir: 0n" lub "rA: 0n", gdzie n oznacza numer LocoNet ID. Przy użyciu prawego pokrętła można zmienić numer LocoNet ID. Można wybrać dowolną liczbę z zakresu od 0 do 7.
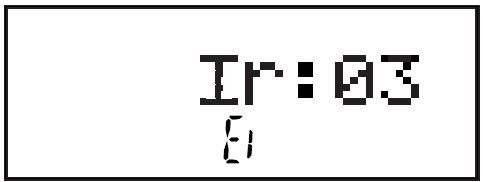
na wyświetlaczu widać, że DT400 znalazł odbiornik podczerwieni z aktualnym LocoNet ID = 03. DT400 jest gotowe do zmiany LocoNet ID.
4. Aby zapamiętać nowy numer LocoNet ID należy nacisnąć przycisk ENTER 
5. DT400 za pomocą którego została wykonana zmiana LocoNet ID automatycznie połączyć się przy pomocy nowej wartości LocoNet ID.
6. Odłącz i ponownie podłącz wszystkie pozostałe manipulatory DT radiowe i na podczerwień, aby połączyły się wykorzystując nowy numer LocoNet ID.
Jeżeli dołączysz nowy panel UR90 lub UR91 do systemu po zmianie LocoNet ID na wartość inną niż 0, musisz przeprowadzić ponownie resynchronizację LocoNet ID zgodnie z powyższą procedurą. Jeżeli działasz na obszarze, gdzie są używane różne systemy LocoNet w niedalekiej odległości, najpierw ustalcie unikalne numery LocoNet ID przed włączeniem swoich systemów.
23.2 Operacje w trybie bezprzewodowym
Wybór lokomotywy
Podczas używania manipulatorów w trybie bezprzewodowym transmitują one sygnał tylko w jednym kierunku: od manipulatora do odbiornika. Manipulator DT400/R musi być podłączony do sieci LocoNet aby wybrać adres lokomotywy. Po wybraniu adresu lokomotywy dla manipulatora można go odłączyć od sieci LocoNet i sterować lokomotywą wykorzystując łączność na podczerwień lub radiową. Manipulator będzie automatycznie wykorzystywał łączność na podczerwień lub radiową przy wszystkich operacjach: ustawianie prędkości, kierunku, funkcji, programowania oraz sterowania rozjazdami.
Digitrax używa bezpiecznej metody lokomotywy, która wymaga podłączenia manipulatora do sieci Loconet. To jest ważna cecha związana z bezpieczeństwem. Digitrax nie pozwala na jednokierunkową zmianę adresu lokomotywy, aby uniemożliwić kilku operatorom wybranie tej samej lokomotywy i jej sterowanie w tym samym czasie. Sterowanie jedną lokomotywą przez kilku operatorów może spowodować poważne problemy i może być odczuwane jako brak kontroli nad lokomotywą przez operatora.
Zwolnienie lokomotywy
W bezprzewodowym manipulatorze dostępne są dwie opcje. Opcje są ustawiane poprzez zmienną Op #3 manipulatora - patrz rozdział 25.2.2.
Manipulator bezprzewodowy nie może zwalniać lokomotyw: Po naciśnięciu przycisku LOCO  , gdy manipulator działa bezprzewodowo, wybrany adres nie jest zwalniany dopóki manipulator nie zostanie podłączony do sieci LocoNet. To jest ustawienie domyślne.
, gdy manipulator działa bezprzewodowo, wybrany adres nie jest zwalniany dopóki manipulator nie zostanie podłączony do sieci LocoNet. To jest ustawienie domyślne.
Bezprzewodowy manipulator może zwalniać lokomotywę: Po naciśnięciu przycisku LOCO
, gdy manipulator działa bezprzewodowo, wybrany adres jest zwalniany natychmiast i manipulator staje się nieaktywny. Aby pobrać inny adres lokomotywy manipulator DT400/R musi zostać podłączony do sieci LocoNet.
Jazda wielokrotna
Lokomotywy w jeździe wielokrotnej muszą być łączone i rozłączane gdy manipulator DT400/R jest podłączony do sieci LocoNet. Operacje te są zablokowane, gdy manipulator działa bezprzewodowo. Po połączeniu lokomotyw w jazdę wielokrotną, mogą one być normalnie sterowane manipulatorem działającym bezprzewodowo.
Programowanie
Tryb programowania na makiecie Ops (PoM) jest jedynym trybem dostępnym gdy manipulator pracuje bezprzewodowo. Po naciśnięciu przycisku PROG  manipulator od razu przejdzie do trybu programowania na makiecie Po. Manipulator DT400R musi być podłączony do sieci LocoNet aby można było korzystać z programowania w trybie bezpośrednim i innych trybów programowania.
manipulator od razu przejdzie do trybu programowania na makiecie Po. Manipulator DT400R musi być podłączony do sieci LocoNet aby można było korzystać z programowania w trybie bezpośrednim i innych trybów programowania.
Sterowanie rozjazdami
Manipulator DT400/R może sterować rozjazdami gdy pracuje bezprzewodowo. Można normalnie zmieniać rozjazdy i uruchamiać Przebiegi przy użyciu przycisków OPTNt i CLOCc.
Szybki zegar
Podczas, gdy manipulator działa bezprzewodowo, będzie się on starał pokazywać Szybki Zegar na podstawie ostatnich danych otrzymanych przy ostatnim podłączeniu do sieci LocoNet. Jeżeli parametry Szybkiego Zegara zostaną zmienione przy pomocy innego manipulatora, manipulator DT400/R nie będzie widział zmian do czasu podłączenia go do sieci LocoNet. W tym momencie pokazywany czas zostanie zaktualizowany.
23.2.1 Blokada manipulator
Podczas używania manipulatora DT400/R bezprzewodowo występują momenty, gdy chcesz zablokować go, aby przypadkowo nie wysłać rozkazów do centralki. Na przykład, twój pociąg czeka na przejazd innego pociągu. Wkładasz manipulator do kieszeni i chcesz iść odpocząć. Zablokowanie manipulatora zablokuje przypadkowe ruszenie twojego pociągu.
Aby zablokować manipulator DT400
1. Naciśnij jednocześnie przycisk Y+  oraz N-
oraz N-  . Podczas blokowania manipulatora upewnij się, że oba klawisze naciśniesz W TYM SAMYM MOMENCIE, aby nie wysłać zmiany prędkości do aktualnie wybranej lokomotywy.
. Podczas blokowania manipulatora upewnij się, że oba klawisze naciśniesz W TYM SAMYM MOMENCIE, aby nie wysłać zmiany prędkości do aktualnie wybranej lokomotywy.
2. Na wyświetlaczu pojawi się napis 'Lock=+&-" i żadne przyciski nie będą działały dopóki manipulator nie zostanie odblokowany.
Aby odblokować manipulator
1. Naciśnij jednocześnie przyciski Y+
oraz N-
. To przywróci manipulator do normalnego stanu.
2. Podłączenie manipulator do sieci LocoNet także spowoduje jego odblokowanie.
;){kind=link}