Autorzy: Gbbsoft i A'Tox, Blue
Trzeba dodać, że to co poniżej zostanie omówione, to przede wszystkim DCC wg NMRA...
Prąd w torach a sygnał DCC
W torach zasilanych sygnałem DCC NMRA S-9.1 płynie prąd przemienny o stałej amplitudzie (czyli maksymalne napięcie jest stałe, zmienia się jego znak oraz kierunek przepływu prądu, np. +/- 16 woltów czyli napięcie cyklicznie zmienia się w zakresie od +16 do -16). Odpowiednia regulacja czasu pomiędzy zmianami napięcia pozwala na zakodowanie podstawowej informacji w postaci ciągu "zer" ("0") i "jedynek" ("1").
Odległości pomiędzy tymi zmianami to impulsy. Generalnie długości impulsów generowanych przez centralkę, zgodnie z normą DCC NMRA S-9.1, powinny zawierać się w zakresie od 55 mikrosekund do 9900 mikrosekund (mikrosekunda to 1/1000000 sekundy).
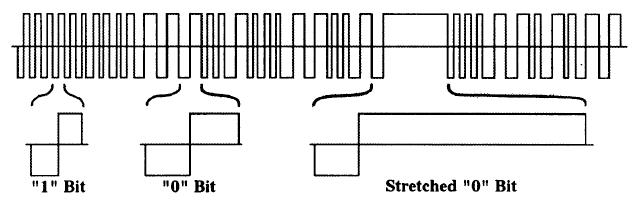
Każda jedynka lub zero składa się z dwóch impulsów ujemnego i dodatniego. Określenia dodatni i ujemny są czysto umowne bo dekoder nie sprawdza znaku napięcia. Decydujące jest następowanie po sobie impulsów przeciwnych. Dla uproszczenia przyjęło się, że najpierw jest impuls ujemny i po nim dodatni.
Jedynka jest kodowana przy użyciu dwóch impulsów, których czasy mieszczą się w zakresie od 55 do 61 mikrosekund.
Zero jest kodowane przy użyciu dwóch impulsów o czasie trwania od 95 mikrosekund do 9900 mikrosekund (zwykle od 91 do 120, dłuższe czasy są stosowane przy sterowaniu lokomotywy analogowej w systemie DCC).
Rozkazy do urządzeń są przesyłane w postaci pakietów. Każdy pakiet składa się z 3..6 bajtów użytecznej informacji, poprzedzonych tzw. preambułą i porozdzielanych tzw. bitami startu. Każdy bajt pakietu składa się z 8 bitów informacji.
Preambuła składa się z min. 12 bitów o wartości 1. Po ostatnim bajcie pakietu następuje bit o wartości 1, który zwykle jest pierwszym bitem kolejnej preambuły. Przed każdym bajtem pakietu jest przesyłany bit o wartości 0.
Pakiet składa się z adresu, danych i sumy kontrolnej (taka suma jest potrzebna, aby sprawdzić, czy pakiet został poprawnie przetransmitowany).
I tu dochodzimy do kolejnej ważnej kwestii: każdy odbiornik danych ma adres. Dzięki temu odbiornik (czytaj: dekoder) czeka tylko na dane, które są adresowane do niego.
Jakie rozkazy można przesłać po torach:
- rozkaz ustawiający kierunek i prędkość jazdy (najczęściej dla dekodera lokomotywy). Z tym że istnieje jedna ciekawa specjalna prędkość: zatrzymaj natychmiast, która powoduje natychmiastowe zatrzymanie lokomotywy. Prędkość jest obecnie wyraża liczbami z przedziału od 0 do 31. Ponieważ 3 z nich nie mają dla użytkownika znaczenia, dlatego normalnie prędkość jest opisywana liczbami od 0 do 28, co nazwaliśmy "28 kroków" (w odróżnieniu od 14 kroków czy 128 kroków)
- rozkaz pusty - on jest dość istotny, ponieważ jest założenie, że w torach jest zawsze nadawany jakiś pakiet. Jeżeli nic nie można sensownego nadać, to jest nadawany właśnie pakiet pusty. Ale tu jeszcze jedna uwaga: w torach nadawane są non-stop aktualne ustawienia dotyczące wszystkich dekoderów lokomotyw, tak aby lokomotywa po zdjęciu i położeniu ponownie na torach dość szybko otrzymała swoje aktualne parametry jazdy.
- rozkaz zatrzymania dla wszystkich dekoderów - co powoduje zatrzymanie wszystkich lokomotyw
Na tym prawdę mówiąc kończy się to, co się nazywa "standardem". Dalsza część, to "rekomendacje", ale dla przeciętnego użytkownika DCC, to prawie jak standard...
A więc później dodano jeszcze inne pakiety:
- włączanie i wyłączanie funkcji dekodera - funkcja to tak naprawę takie wyjście z dekodera (ale nie tylko, także pewna właściwość np: zwolnienie o połowę prędkości, czy wyłączenie bezwładności hamowania i przyspieszania), na które podać lub nie prąd. A co dalej się dzieje, to jest uzależnione tylko od inwencji ludzkiej (np: zaświeca się światła oświetlające koła lokomotywy)
- pakiety łączące kilka lokomotyw w składy (jazda wielokrotna)
- komendy prędkości, ale dla 128 kroków
- komendy programowania CV (patrz dalej)
- komendy dla dekoderów akcesoriów: włącz albo wyłącz jedno z 8 wyjść dekodera
Sterowanie silnika przez dekoder lokomotywy
W ciekawy sposób sterowany jest silnik przez dekoder lokomotywy. Przy tradycyjnym sterowaniu analogowym silnik otrzymywał przez cały czas napięcie. Wartość napięcia zasilania określała prędkość obrotów silnika i jazdy lokomotywy. Przy sterowaniu silnika przez dekoder silnik jest zasilany w sposób nieciągły prądem o stałym napięciu. O prędkości obrotowej silnika decyduje stosunek czasu, przez który silnik jest zasilany do czasu, gdy zasilania jest odcięte.
Taki cykl jest powtarzany dość często - w nowoczesnych dekoderach z częstotliwością do kilkudziesięciu kHz (tysięcy razy na sekundę). W ten sposób silnik zyskuje znaczny moment obrotowy już przy bardzo niskiej prędkości.
Częstotliwość sterowania silnika może być w niektórych dekoderach ustawiana przez użytkownika (szukaj: PWM)
Drugą ciekawą sprawą jest "kompensacja obciążenia". Jest to technika, która umożliwia utrzymanie przez lokomotywę stałej prędkości jazdy niezależnie od obciążenia (wynikającego tak z ilości ciągniętych wagonów jak i np: podjazdów i zjazdów). Technicznie polega to na tym, że w momencie, gdy dekoder nie podaje napięcia na silnik, silnik działa jak prądnica i wytwarza mały prąd, którego wielkość jest proporcjonalna do aktualnej prędkości obracania się silnika. Dekoder mierząc ten prąd jest wstanie ustalić z jaką rzeczywiście prędkością silnik się obraca i odpowiednio reagować. Proszę zauważyć, że moment, kiedy dekoder może zmierzyć prędkość silnika, jest coraz krótszy jak prędkość lokomotywy rośnie (bo czas nie-podawania prądu do silnika jest coraz mniejsza). Więc w pewnym momencie dekoder może zacząć źle odczytywać prędkość silnika - dlatego w niektórych dekoderach jest CV, które umożliwia wyłączenie kompensacji obciążenia powyżej pewnej prędkości.
Jazda lokomotyw analogowych w DCC
W standardzie przewidziano możliwość uruchomienia jednej lokomotywy bez zamontowanego dekodera (analogowej) na makiecie zasilanej sygnałem DCC.
Jak to jest możliwe? Przy "normalnej" transmisji sygnału DCC przebieg napięcia w torach jest symetryczny, a więc jego średnia wartość wynosi 0. Jeżeli na torze zasilanym takim sygnałem postawimy lokomotywę bez dekodera, to jej silnik będzie stał, chociaż przepływ prądu będzie powodował "buczenie" i wydzielanie ciepła. Jeżeli jednak przebieg w torach stanie się asymetryczny - "dola" lub "górna" część sygnału ulegnie wydłużeniu - średnia wartośćnapięcia będzie różna od zera i lokomotywa bez dekodera zacznie jechać.
Jeżeli użytkownik ustawi na manipulatorze adres 0 (zero) i przekręci gałkę, to centrala zacznie nadawać asymetryczny sygnał DCC, w którym połówki bitu o wartości 0 będą miały różną długość.
Spowoduje to, że lokomotywa analogowa zacznie dostawać niesymetryczny prąd, co dalej spowoduje, że w jedną stronę będzie "szarpana" dłużej niż w druga - zacznie w tę stronę jechać. Wybór połówki, dla której "0" jest dłuższe, determinuje kierunek jazdy, a rż'nica czasów obu połówek zera - prędkość jazdy.
W ten sposób można (nie we wszystkich systemach, w Roco - nie, w Lenz - tak) sterować jedną lokomotywą analogową na makiecie cyfrowej. Uwaga praktyczna: udało nam się w ten sposób spalić kilka lokomotyw, ponieważ napięcie podawane do takiej lokomotywy praktycznie przekracza 12V.
Dekodery urządzeń
Dekodery urządzeń umożliwiają sterowanie urządzeniami na makiecie. Najczęściej dekoder urządzeń ma od 4 do 8 wyjść, na które można podać prąd lub nie za pomocą naciśnięcia przycisku na manipulatorze. Do dekodera urządzeń najczęściej podłącza się: silniki/elektromagnesy sterujące rozjazdami lub semaforami kształtowymi, światła semafora świetlnego.
Warto tu zwrócić uwagę na kilka istotnych spraw:
- najczęściej jeden rozjazd jest podłączony do dwóch wyjść dekodera urządzeń. Z tego powodu istnieją dwa sposoby numeracyjne dekoderów urządzeń. Jeden (stary) numeruje podłączone rozjazdy czyli: 1, 2, 3, 4, 5, 6 itd. Drugi to podanie: adresu dekodera urządzeń i numeru wyjścia dekoder. Czyli: rozjazd=1 to adres=1 wyjście=0 i 1; rozjazd=2 to adres=1 wyjście 2 i 3; rozjazd 5, to adres=2 wyjście 0 i 1 itd... (zakłada się, że jeden adres ma 8 wyjść)
- istnieją dekodery (np: Lenz), które nadają się tylko do obsługi rozjazdów i semaforów kształtowych. Spowodowane to jest tym, ze te dekodery potrafią podać prąd tylko na JEDNO wyjście w jednym momencie. Dodatkowo mają one (choć można to wyłączyć) programowany czas, po którym wyłączają zasilanie wyjścia, w celu uniknięcia spalenia elektromagnesu rozjazdu.
- adresy dekoderów urządzeń nie mają nic wspólnego z adresami lokomotyw.
CV
Każdy dekoder (lokomotywy jak i urządzeń) posiada coś takiego jak CV. Są to komórki, ponumerowane, które mogą przyjmować wartości od 0 do 255. Numeracja CV zaczyna się od 1. Zmiana wartości CV w dekoderach nazywa się programowaniem.
Co oznaczają wartości wpisane w te komórki? To zależy w które... Część CV została opisana w standardzie i pozostałe zostały pozostawione producentom, którzy używają je wg własnych potrzeb (opis znajduje się najczęściej w instrukcji obsługi do dekodera). Warto tu zaznaczyć, że chociaż podstawowe CV zostały opisane w standardzie (i są dostępne tutaj: Standardowe CV ), to zawsze warto zajrzeć do instrukcji od producenta, aby się upewnić czy (a) dane CV w ogóle zostało zaimplementowane (b) jaki jest dozwolony zakres wartości do spisania.
Kilka podstawowych CV:
CV1 - adres dekodera (dozwolone wartości od 1 do 99). To jest najstarszy sposób numerowania dekoderów.
CV2 - prędkość minimalna. Prędkość lokomotywy dla szybkości 1
CV3 - bezwładność przyspieszania. Określa, jak "wolno" lokomotywa przyspiesza
CV4 - bezwładność zwalniania. Określa, jak "wolno" lokomotywa zwalnia
itd.
W niektórych CV ważne są nie tyle wartości wpisane, ale pojedyncze bity. Najpopularniejszym takim CV jest CV29 (Bity konfiguracyjne), w którym każdy bit opisuje pewne zachowanie się dekodera. Niektóre systemy sterowania DCC potrafią zmieniać pojedyncze bity (Lenz), a w pozostałych trzeba osobiście obliczać wartość do wpisania, aby ustawić odpowiednie bity w całym bajcie (Roco).
Boostery
Urządzeniem, który bezpośrednio podaje prąd do torów jest booster. Booster na wejściu dostaje (a) prąd z zasilacza (b) "czysty" sygnał DCC z centralki. Zadaniem boostera jest "zmieszanie" słabego sygnału DCC z prądem z zasilacza i podanie mieszanki na tory. Booster także musi potrafić wykryć zwarcie/przeciążenie na torach i przekazać tę informację do centralki. Musi także na żądanie centralni przestać podawać prąd na tory (sytuacja awaryjna).
Boostery posiadają określoną wydajność opisywaną w amperach. Próba poboru prądu przekraczającego wydajność boostera powoduje zgłoszenie zwarcia. Przykładowe maksymalne obciążenia boosterów: Roco: 2.5A, Lenz: 5A
Uwaga: Obecnie bardzo często łączy się centralkę i booster w jedno urządzenie (np: Lenz, ale nie Roco!)
W sytuacji, gdy pobór prądu na makiecie przekracza możliwości boostera można (i należy) użyć więcej niż jednego boostera. Boosterów na makiecie może być kilka. Każdy z nich powinien zasilać oddzieloną od innych sekcję torów (przerwa na obu szynach torów).
Uwaga: Jeżeli przejazd lokomotywy z jednej sekcji do drugiej powoduje sygnalizowanie zwarcia, najczęściej wystarczy zamienić przewody, idące od jednego z boosterów do torów, miejscami.
Centralka
Centralka to najważniejsze urządzenie na zapleczu. Zajmuje się ona dwoma podstawowymi zadaniami: generowaniem sygnału DCC dla boostera i zarządzanie infrastrukturą urządzeń na zapleczu. Dokładniej:
- generowanie sygnały DCC dla lokomotyw na makiecie, zatrzymanie podawania prądu na tory, odbiór informacji z boosterów o zwarciu
- pamiętanie ostatnich ustawień znanych lokomotyw i podawanie ich non-stop na tory (kierunek jazdy, prędkość, stan świateł i funkcji)
- pamiętanie ustawień dekoderów urządzeń
- obsługiwanie programowanie dekoderów
- ew. zarządzenie siecią łączącą urządzenia na zapleczu (np: XPressNet)
Przykładem centralki jest: Lenz LZV100, myszka Roco włożona w gniazdo Master, czy program DDW
Manipulatory
Do najczęściej używanych urządzeń na zapleczu należą manipulatory (myszki), które umożliwiają sterowanie lokomotywami. Za pomocą niektórych z nich (np: Roco MultiMaus czy Lenz LH100) można także sterować urządzeniami (w innych przypadkach służą do tego specjalne "klawiaturki"). Większość potrafi także przeprowadzić proces programowania CV w dekoderach.
Interfejs do PC
Makietą można sterować z programu komputerowego. Aby można było podłączyć komputer do centralki najczęściej potrzebne jest dodatkowe urządzenie. Na przykład: w systemie opartym na magistrali XPressNet (Roco/Lenz) takim urządzeniem jest Lenz LI-101F lub Lenz LI-USB. W systemach opartych na magistrali Loconet są: Loco-Buffer-II)
Informacja zwrotna
Informacja zwrotna w obecnej wersji jest to system urządzeń, które umożliwiają przekazanie informacji z makiety do urządzeń na zapleczu, którym najczęściej jest program komputerowy (choć tą informację można także odczytać na niektórych manipulatorach). Jaka informacja jest przekazywana, to zależy od możliwości i potrzeb programu. Najczęściej jest to informacja o pojawieniu się lokomotywy w pewnym konkretnym miejscu.
Przykładami systemów informacji zwrotnej są:
- w systemie Lenz urządzenia: LR101 (8 wejść) które podłącza się do centralki LZV100
- w systemie LDT: HSI-88, które podłącza się do wyjście RS232 komputera, oraz dodatkowe moduły np: RM-DEC-88
- w systemie Martinezo: MSZ-S88 i MWO-S88
Najczęściej informacja zwrotna polega na przekazanie do centralki/PC faktu zwarcia dwóch przewodów.
Zwarcie może być powodowane:
- przez zwarcie w kontaktronie, który znalazł się w polu magnetycznym magnesu przyczepionego od spodu lokomotywy/wagonu
- wjechanie kołami lokomotywy/wagonu na specjalny tor
- wykrycie poboru prądu na odcinku izolowanym przez lokomotywę, wykryte przez specjalny układ (np: Lenz LB101)
W bardziej rozbudowanych systemach (np: firmy LDT) poprzez informację zwrotna można przekazać także numer lokomotywy, która pojawiła się w danym miejscu.
Dalszą ewolucją systemu informacji zwrotnej będzie prawdopodobnie system RailCom (autorstwa firmy Lenz).
Patrz także:
http://www.dcc24.eu/Teoria
http://www.4dpnr.org/articles/DCC_Wiring.pdf
;){kind=link}